16.10.2023 - - - scienza cronaca escursionismo alpinismo
Un gruppo di studenti del corso di laurea intitolato Information and Communications Technologies for Smart Societies (ICT4SS) presso il Politecnico di Torino ha presentato un interessante progetto di ricerca realizzato con la collaborazione dell’Istituto di Ricerca per la Protezione Idrogeologica (IRPI) del CNR e con il Corpo Nazionale Soccorso Alpino e Speleologico (CNSAS) sull’utilizzo dei droni nelle ricerche dispersi in terreno impervio. Un lavoro di studio e realizzazione pratica di strumenti informatici per l’utilizzo, la geolocalizzazione e l’analisi di video e fotografie realizzate da aeromobili a pilotaggio remoto durante le operazioni di soccorso in montagna.
 Individuazione con intelligenza artificiale di un target (in verde) e dei falsi positivi (in blu) da immagine scattata con drone. © arch. Search & Rescue 2 (Politecnico di Torino)
Individuazione con intelligenza artificiale di un target (in verde) e dei falsi positivi (in blu) da immagine scattata con drone. © arch. Search & Rescue 2 (Politecnico di Torino)
L’idea ribattezzata "Search & Rescue 2" è stata elaborata da Antonio Castelluzzo, Diletta Romano, Raffaele Pezone e William Napolitano che, con la supervisione dei docenti del Politecnico Marco Piras e Vincenzo Pietra e di Daniele Giordan dell’IRPI hanno coinvolto i piloti di drone del CNSAS Saverio Isola e Giorgio Viana per individuare le necessità operative in un settore nascente e in forte sviluppo. L’obiettivo, che riprendeva uno studio realizzato dagli studenti del corso precedente Alessandro Ferri, Francesco Lipani e Andrea Domenico Moruglia, era georeferenziare le immagini realizzate dai droni nelle aree di ricerca per riportare in cartografia digitale le zone investigate in fase di sorvolo, realizzare una piattaforma informatica per una gestione efficiente e rapida della grande mole di dati ottenuti in operatività e valutare l’impiego di intelligenza artificiale nell’individuazione di possibili dispersi a partire da foto e video realizzati dai velivoli. Il tutto, naturalmente, da rendere fruibile con software open source e in grado di dialogare con la più ampia gamma di formati e dati utilizzati dalle ditte produttrici di droni.
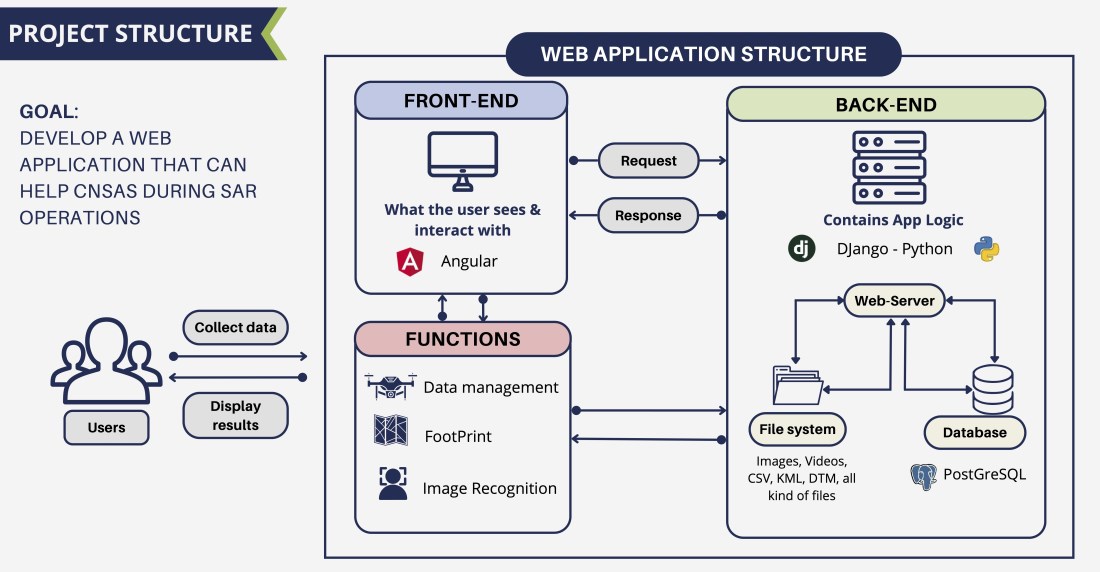 Schematizzazione del processo di lavoro da parte del team di Searc & Rescue 2. © arch. Search & Rescue 2 (Politecnico di Torino)
Schematizzazione del processo di lavoro da parte del team di Searc & Rescue 2. © arch. Search & Rescue 2 (Politecnico di Torino)
Concretamente gli studenti hanno lavorato su un’ampia dotazione di riprese realizzate dai piloti del CNSAS durante interventi reali e simulazioni per l’ingegnerizzazione degli strumenti di elaborazione informatica, sia per la sperimentazione dell’analisi digitale per l’individuazione automatica dei dispersi. Proprio in questo ambito, la ricerca ha dato i risultati più eclatanti grazie all’intelligenza artificiale che è stata in grado di identificare alcuni target laddove l’analisi visiva degli operatori aveva fallito e di discernere i cosiddetti falsi positivi, cioè oggetti confondenti che distraggono l’attenzione del personale addetto alle ricerche. Grazie alla georeferenziazione delle immagini, il software è in grado di fornire le coordinate GPS di qualunque elemento di un’immagine per un successivo sopralluogo sul terreno da parte delle squadre di tecnici a terra.
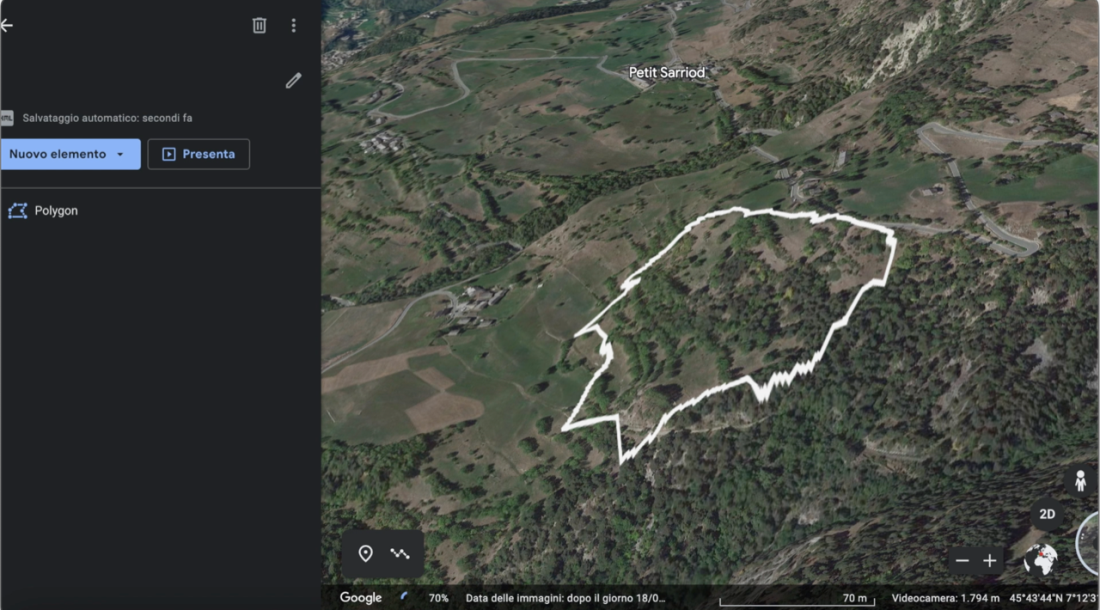 La georeferenziazione in 3d di un'area di ricerca coperta da un drone. © arch. Search & Rescue 2 (Politecnico di Torino)
La georeferenziazione in 3d di un'area di ricerca coperta da un drone. © arch. Search & Rescue 2 (Politecnico di Torino)
La ricerca degli studenti è stata arricchita dalla realizzazione di un primo prototipo di piattaforma web, già pronta all’uso, che può essere implementata sulla base di ulteriori richieste e necessità di un eventuale committente a dimostrazione della completezza e validità di un lavoro che merita un concreto futuro applicativo.
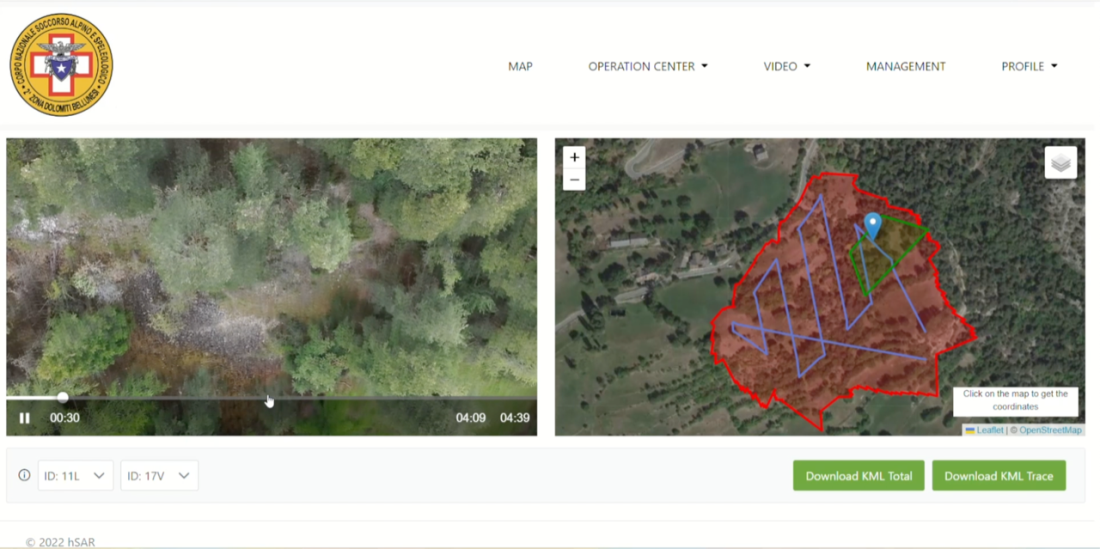 La georeferenziazione di immagini riprese con drone. © arch. Search & Rescue 2 (Politecnico di Torino)
La georeferenziazione di immagini riprese con drone. © arch. Search & Rescue 2 (Politecnico di Torino)